一、简介
基于完全自主研发并世界首创的RTK-SLAMTM 技术,实现了室内室外训练场地一体化连续扫描、建模和测量,无论场景中是否具有GNSS信号都能获得高精度的三维点云模型及全景影像,支持步行、骑行、车载、船载等多种作业模式,作业过中无需初始化、无需停留中断、无时间限制、并且无需换站拼接,数据处理简单方便,全自动化和智能化,无需人工干预。相比传统测绘装备,该测绘机器人可以数十倍地提高测绘作业的工作效率,生产高精度的全要素测绘成果。

二、优势
核心技术——独有的 RTK-SLAMTM 技术;
工作模式——无初始化、无中断、无停留、无时间限制、无换站拼接,可步行、可骑行,室内外一体无缝扫描;
图像数据——支持全景影像数据采集、浏览及应用;
点云模型——通用数据格式支持所有第三方软件、平台应用成果;
扫描精度——相对精度0.02-0.03米,绝对精度0.05米;
坐标系统——室外支持RTK模式,无需布设标靶即可引入绝对坐标;
数据处理——全自动化数据处理模式,简单易用无需人工干预;
系统扩展——照明、防爆、防腐、特色涂装等订制扩展方便。
三、产品结构与应用领域

应用领域:相比传统测绘装备,RTK-SLAM™背负式激光雷达测绘机器人可以数十倍地提高测绘作业的工作效率,生产高精度的全要素测绘成果,其应用将会更加广泛。
四、系统运行

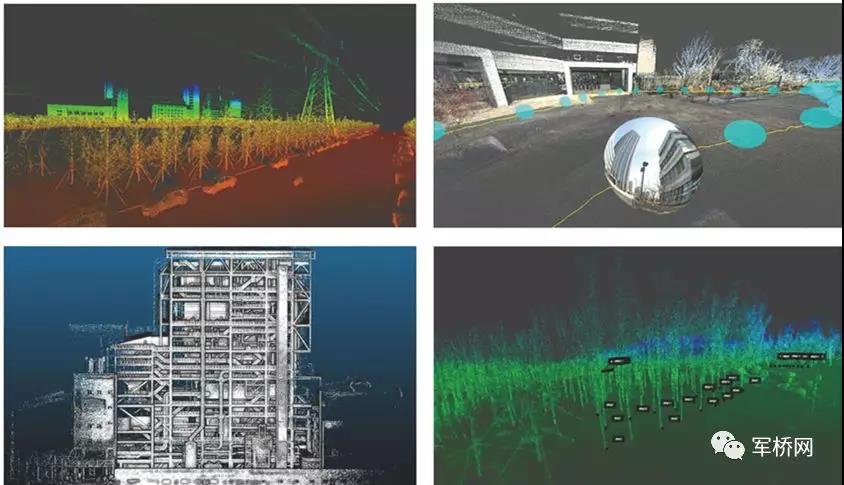
五、采集案例


1.公安应急 + 反恐防爆 + 消防急救 + 预案模拟
| 测试区域 | 门头沟区阳光大厦 |
| 配套软件 | OmniSLAMTM Mapper + AutoCAD |
| 硬件设备 | SR-DLP6 |


2.森林消防
| 测试区域 | 天津南翠屏公园 |
| 配套软件 | OmniSLAMTM Mapper + AutoCAD |
| 硬件设备 | SR-DLP6 |

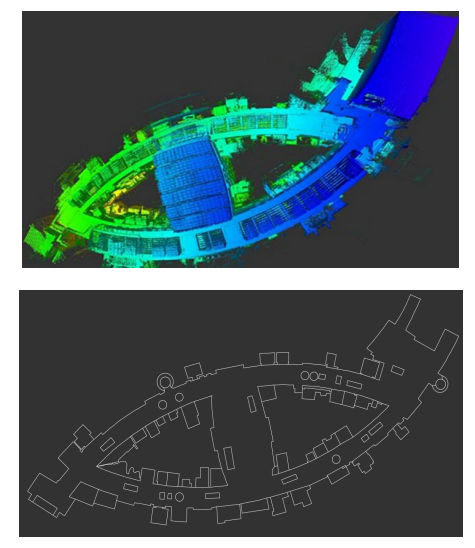
3.室内测图
| 测试区域 | 沈阳市恒隆广场 |
| 配套软件 | OmniSLAMTM Mapper + AutoCAD |
| 硬件设备 | SR-DLP6 |
| 总面积:60000平方米 采集时间: 35min 制图时间:40min | |
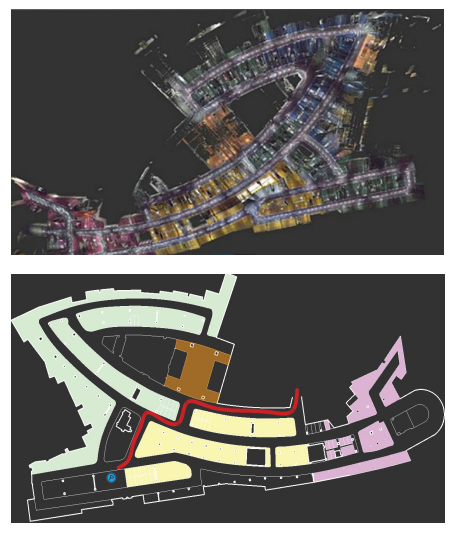
4.室内定位和导航测图
| 测试区域 | 沈阳市恒隆广场底下停车场 |
| 配套软件 | OmniSLAMTM Mapper + AutoCAD |
| 硬件设备 | SR-DLP6 |
| 总面积:15000平方米 采集时间: 15min 制图时间:60min | |
预案作战指挥与训练系统:
系统结合GPS/北斗定位与室内超宽带定位无缝融合,能够实时记录下带有时间戳的单兵移动轨迹,通过跟踪监测军事训练中单兵、战斗分队、车辆物资的活动,来监测作训实施,战术执行、导演导调等情况,分析是否按照计划进行训练,事后对军事训练复盘和参谋作业进行回溯,使得训练效果得到显著的提高。
